ACTIVITES DE RECHERCHE
Lien vers la présentation graphique des travaux de recherche.
Nos travaux de recherche ont tout d'abord concerné l'utilisation de la logique floue, des réseaux de neurones et des algorithmes génétiques [C3], [C6], [C9] pour l'identification et la commande de machines électriques. L'article [A1] présente l'étude du remplacement du régulateur flou de vitesse par un régulateur neuronal au sein d'un schéma de contrôle vectoriel de la machine asynchrone (MAS). La procédure d'apprentissage du réseau de neurones est également abordée.
Suite au développement d'un modèle qui tient compte de la structure du rotor [C2], les aspects de fonctionnement et de commande de la machine asynchrone présentant des défauts rotoriques [J1], [C10], [C11], [C12] ont également fait l'objet d'investigations.
Plus récemment, nous nous sommes intéressé au problème de défaillance de capteurs de courant et de tolérance au défaut dans une commande vectorielle de MAS [C18].
Enfin, la commande sans capteur mécanique est également un sujet de recherche auquel nous nous sommes intéressé. Notre souci était de mettre au point une commande vectorielle simple, du point de vue implantation expérimentale et temps de calcul et à la fois robuste, reposant sur un minimum de paramètres à connaître pour un contrôle performant. L'article référencé [C7] expose cette méthode et les premiers résultats que nous avons obtenus. Cette approche a été utilisée avec succès pour implanter commande vectorielle sans capteur hybride (directe et indirecte) pour les très basses vitesses et l'arrêt [D4].
Depuis décembre 2000, une nouvelle approche a été adoptée, elle repose sur l'injection d'un signal haute fréquence superposé au signal du fondamental de la tension (dans un schéma de contrôle vectoriel) [D5], [C14]. Le but est d'arriver à extraire une image de la vitesse et de la position du rotor [A4]. Ceci a fait l'objet de la thèse d'Imad Al-Rouh.
Nous continuons à développer des méthodes de commandes sans capteur mécanique pour la machine asynchrone, (par exemple [C22]) qui tient compte de la saturation de la machine à l'aide d'utilisation de modèle de référence adaptatif (MRAS) et de réseaux de neurones.
Nous travaillons également sur les méthodes d'identification des paramètres et d'optimisation de processus basées sur les algorithmes génétiques [C9] et les PSO (Optimisation par essaim de particules). Applications : MAS [C15], commande MLI [article soumis].
Depuis 2003, nous nous sommes intéressés à la commande de la Machine Asynchrone Double Etoile (MASDE). Cette machine permet la segmentation de puissance. Elle permet aussi d'accroitre la fiabilité grâce à la redondance des enroulements statorique et ainsi de pouvoir reconfigurer l'alimentation des enroulements en cas de défaut. On peut également obtenir une réduction des vibrations en améliorant la qualité du couple électromagnétique produit à l'aide de MLI spéciales.
Suite à des travaux portant sur une MLI optimisée [C16], un élargissement de l'étude des MLI continues et discontinues appliquées à la MASDE est en cours [A5].
Des travaux avec nos partenaires du laboratoire CREA (Amiens) ont commencé en septembre 2004 autour de la commande vectorielle, avec et sans capteur de la MASDE. Ils ont été ponctués par la soutenance de thèse de Monsieur Réza Kianinezhad et ont donné lieu à 2 articles de congrès ([C20], [C21]) et 1 article de revue soumis.
Une thèse en co-encadrement est également en cours, il s'agit, pour le doctorant Khoudir Marouani, d'étudier, dans un premier temps, des techniques particulières de space vector PWM appliquées à l'alimentation de la MASDE [C23], ensuite, d'élaborer des commandes vectorielles ou de DTC utilisant les PWM développées.
Travaux d'encadrement :
- Co-direction de la thèse de Doctorat de Khoudir Marouani, en coopération EMP (Algérie) - GREEN - UHP, commencé en janvier 2005 : "Techniques de commande vectorielle et d'alimentation MLI des machines asynchrones double étoile".
- Co-direction de la thèse de Doctorat d'Imad Al-Rouh, effectuée au GREEN - UHP, décembre 2000 à juillet 2004 :
"Commande sans capteur de la machine asynchrone".
- Co-encadrement de stage de DEA effectué au GREEN - UHP, mai 2002 à septembre 2002 :
"Modélisation et Commande de la génératrice asynchrone", DEA PROTEE de Mr A. CHETOUANE.
- Co-encadrement de stage de DEA effectué au GREEN - UHP, mai 1997 à septembre 1997 :
"Etude et modélisation de machines asynchrones présentant des défauts de structure", DEA PROTEE de Mlle A. ABED.
Stage de DEA au GREEN-UHP, d'avril à juillet 1995, intitulé
"Commande vectorielle d'une machine asynchrone à enroulements de mesure de f.e.m.", comportant des parties théoriques, de simulation et expérimentales.
Sujet de Thèse
Le travail de Thèse s'articule autour de la commande vectorielle
de la machine asynchrone. Grâce au découplage introduit entre
le réglage du couple et celui du flux, il est possible d'obtenir
une réponse dynamique élevée de la machine. Ces méthodes
n'ont pu être appliquées qu'avec l'essor considérable
de la micro-électronique et de l'électronique de puissance.
De nombreuses stratégies de régulation sont possibles
mais ont des conséquences différentes (comportement dynamique,
robustesse...). Par ailleurs, si certaines donnent de bons résultats
en simulation, elles sont pratiquement impossibles à implanter expérimentalement.
Confrontés à ces problèmes, il est nécessaire
d'affiner les modèles de la machine elle-même d'une part et
d'explorer des voies nouvelles par ailleurs. La validation des études
menées ne peut se faire qu'avec un banc expérimental. Ceci
nous a conduit à en élaborer un. C'est l'interaction des
résultats de simulation et d'expérimentation qui nous a permis
d'affiner nos commandes et d'en essayer des nouvelles (floue, neuronale).
L'ensemble de ces travaux a déjà fait l'objet de nombreuses
publications.
Résumé du mémoirede Thèse [J1]
Les algorithmes génétiques, la logique floue et les réseaux
de neurones sont de plus en plus utilisés dans des domaines d'application
très variés. Nous nous proposons de les étudier dans
le cadre de l'identification et de la commande de la machine asynchrone.
Plus particulièrement, nous utilisons les algorithmes génétiques
afin d'identifier les paramètres du modèle dynamique de la
machine. Des régulateurs, à base de logique floue et de réseaux
de neurones, sont implantés au sein d'une commande vectorielle par
orientation du flux rotorique.
Est également abordée l'influence de la variation des
paramètres sur le fonctionnement du système. Les défauts
de structure de la machine asynchrone sont considérés dans
le cas des ruptures de barres au rotor. Le diagnostic de ces défauts
ainsi que leur influence sur le comportement de la régulation sont
étudiés.
Enfin, une amélioration de la commande vectorielle sans capteur
mécanique est présentée ouvrant une voie vers les
techniques "intelligentes" de commande. Ces dernières sont maintenant
possibles compte tenu de la puissance sans cesse grandissante des processeurs.
Un logiciel de simulation, développé dans le cadre de
la thèse, a permis de mener une bonne partie des études présentées.
Une attention particulière a été accordée à
la partie expérimentale, seul garant de la faisabilité et
de la validation de l'étude.
Mots-clés:
Machine asynchrone, Double étoile, Commande vectorielle, Logique floue, Réseaux de neurones, Algorithmes génétiques, Optimisation par essaim de particules, Identification, Diagnostic de défauts, Commande sans capteur.
Ces travaux de recherche ont été effectués au
sein du laboratoire GREEN sous la direction de Monsieur le Professeur A.
REZZOUG
Groupe de Recherche en Electrotechnique et Electronique de Nancy
GREEN-UHP, UPRES - A 7037
Faculté des Sciences, BP 239, 54506, Vanduvre-lès-Nancy
Direction : Professeur
.
Liste des publications
Revenir à la page d'accueil
Illustration des travaux de recherche
Nos travaux s'inscrivent au sein de l'équipe Commande - Diagnostic au GREEN-UHP.
- Axes :
- Machine asynchrone, simple et double étoile.
- Modèle, identification, commande MLI, vectorielle, sans capteur, diagnostic.
- Développement d'outils :
L'identification des paramètres de la machine :
Algorithmes d'identification :
- PSO : Particle Swarm Optimisation (Optimisation par Essaim de Particules)
- GA : Genetic Algorithm (Algorithme Génétique)
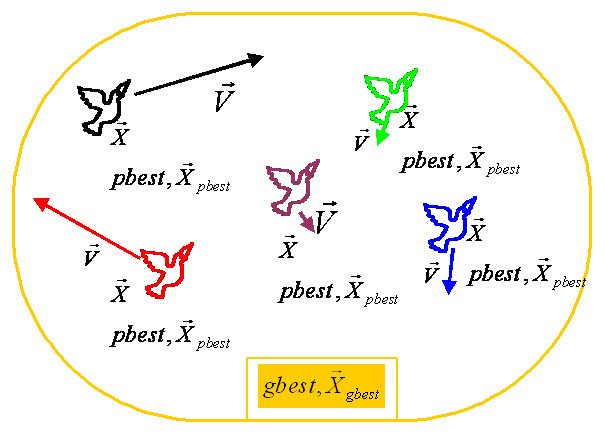
L'optimisation par essaim de particules (Particle Swarm Optimisation : PSO) a pour but de rechercher l'optimum global d'une fonction coût. L'analogie se fait par rapport à un essaim (population) d'oiseaux par exemple qui sont à la recherche de nourriture (optimum global).
Chaque oiseau, en explorant l'espace de recherche, trouve un optimum personnel (personal best) et connaît également l'optimum global (global best) de l'essaim. Ainsi, il continue à voler tout en garder ces informations.
Ces 2 optimums vont intervenir sur la manière dont la trajectoire de l'oiseau se modifie en changeant son vecteur vitesse.
Le PSO est moins sensible aux problèmes de l'optimum local.
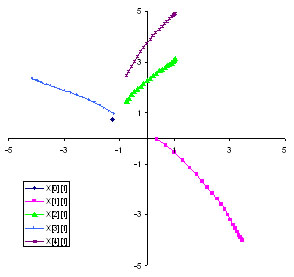
Evolution de la trajectoire de 5 particules lancées au hasard dans un espace à 2 dimensions (optimum global réel en (0, 0). On voit bien que la particule n°0 ne bouge pas pendant les 20 premières époques (équivalent de génération / pas de calcul) car son optimum personnel correspond à l'optimum global trouvé de l'essaim. Les autres particules convergent vers elle.
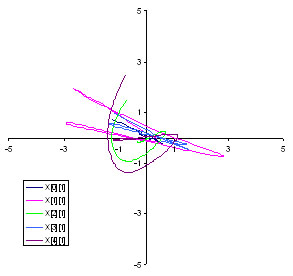
En chemin, la particule 1, passe près du centre. L'optimum global change alors et les autres particules changent leur vecteur vitesse (incurvation des trajectoires : époques 20 à 120). On observe aussi que la particule 1 arrive à toute vitesse sur le centre et le dépasse à cause de sa vitesse, elle revient ensuite tout en gardant en mémoire les coordonnées de l'optimum global ainsi trouvé.
Cela permet de continuer l'exploration de l'espace de recherche sans perdre l'information de l'optimum global.
 |
 |
| Epoch 0 à 20 |
Epoch 20 à 120 |
Les algorithmes génétiques sont aussi un procédé d'optimisation de fonction coût (fitness) qui utilisent les procédés de mutation et de croisement pour calculer, à chaque itération, la nouvelle population de chromosomes. Chaque chromosome est constitué de gênes porteurs de l'information à la manière d'un vecteur de paramètres. Une grande population en constante évolution va s'arranger, grâce à un algorithme d'évolution, en faisant ressortir des individus (chromosomes ou vecteur de paramètres) ayant un fitness élevé. On obtient ainsi l'optimum global.
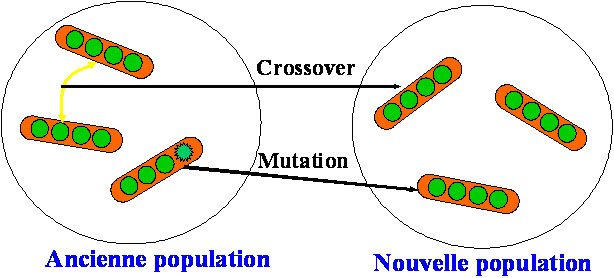
GA : Création d'une nouvelle génération à partir d'une ancienne
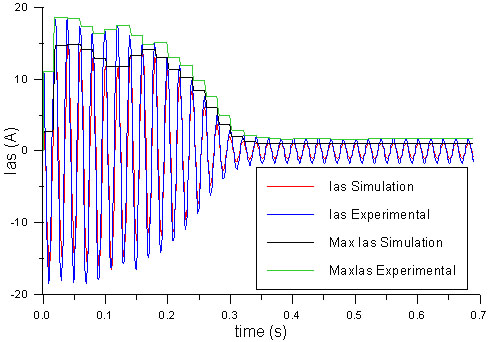
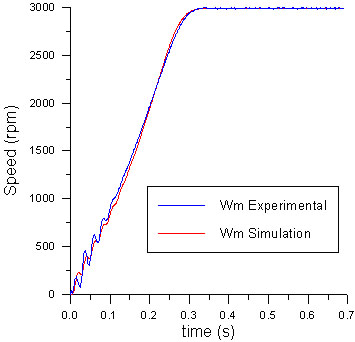
Application à l'identification des paramètres de la MAS sur un démarrage direct sur le réseau
Les paramètres sont ajustés par l'algorithme jusqu'à ce que les 2 courbes (relevé expérimental et celle issue du modèle simulé utilisant ces paramètres) coïncident sur l'ensemble de points, en privilégiant le régime permanent grâce à une fonction poids de type sigmoïde.
Commande sans capteur
co-encadrement d'une thèse soutenue en juillet 2004 par Imad Al-Rouh. Article de référence : [A4] Signal analysis and identification for induction motor sensorless control
Difficultés :
- Basses vitesses et arrêt
- Injection de porteuse HF
- Traitement de signal
Le principe de cette approche est l'injection d'un signal sinusoïdal haute fréquence (400 Hz) par-dessus le fondamental issu des régulateur de courants d'une commande vectorielle de machine asynchrone.
La tension résultante est appliquée par un onduleur de tension. La composante haute fréquence va interagir avec une éventuelle réluctance de la machine aussi faible soit elle.
Nous traitons ce signal, après l'avoir extrait du courant résultant, puis nous en déduisons la position et la vitesse du rotor.
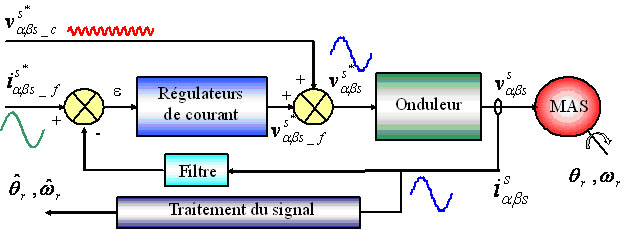
Schéma de principe
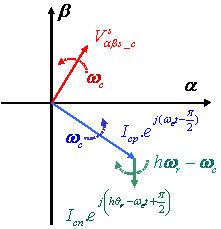
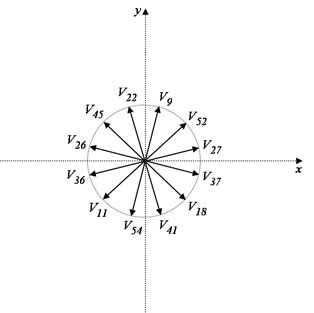
Cette figure représente la composante haute fréquence (indice c : carrier _rouge_) du vecteur tension qui tourne à une pulsation wc dans le repère alpha-beta statorique.
Les composantes de courant, qui résulte de l'interaction du vecteur tension avec les saillances de la machine, comporte une composante directe (indice p : positive sequence _bleu_) et une composante inverse (indice n : negative sequence) dans le cas d'une seule saillance.
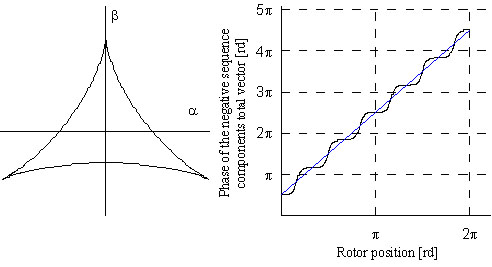
Lieu théorique des composantes négatives du courant dans le repère tournant à -wc
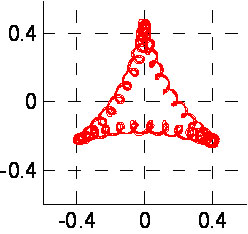
Dans le cas de 2 saillances, par exemple (h1=2, h2=-4, f1=f2=0°, Icn2/Icn1=0.5), le lieu des composantes négatives du courant, dans le repère tournant à -wc de votre machine, est représenté dans la figure ci-dessous.
 |
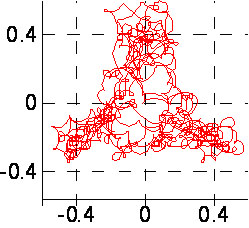 |
| Simulation |
Expérimental |
MAS double étoile
Techniques de Space Vector PWM
co-encadrement d'une thèse en cours
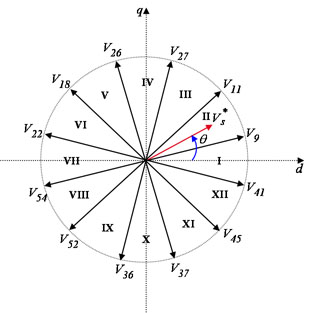
La MLI à vecteur spatial de tension d'une machine double étoile consiste à découper le plan alpha-beta en 12 secteurs.
En fonction du secteur où l'on se trouve, il faut choisir les bons vecteurs de tension (64 possibilités) qui permettent d'imposer le fondamental et de minimiser les ondulations de couple.
 |
 |
| plan dq |
plan xy, Vsxy_ref=0 |
Sélection des vecteurs tension dans les plans dq et xy
MLI vectorielle continue et discontinue
Le calcul des instants d'application des vecteurs de tension, ainsi que le mode de calcul permet d'aboutir à plusieurs choix possibles, notamment la MLI discontinue (SVPWM DA). Cette dernière permet d'économiser les pertes par commutation, puisqu'un bras ne commute pas sur un secteur.
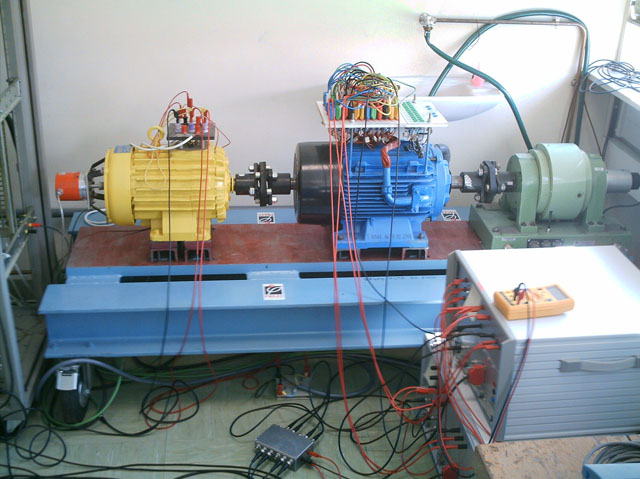
Nouveau banc expérimental
Ce banc permet de tester nos algorithmes de commande vectorielle et de MLI (continue et discontinue) sur une machine asynchrone double étoile.
Il comporte une carte dSpace 1104, trois onduleurs 2 niveaux de 6 kVA, une MAS de 5.5 kW, une MASDE (double étoile), un codeur incrémental 4096 points, un frein à poudre.

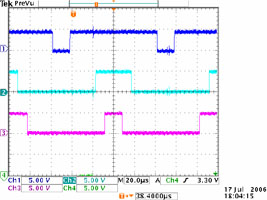
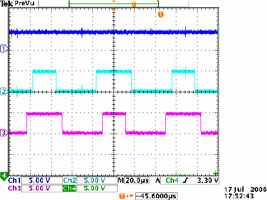
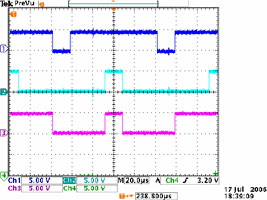
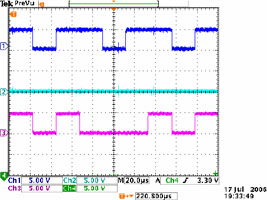
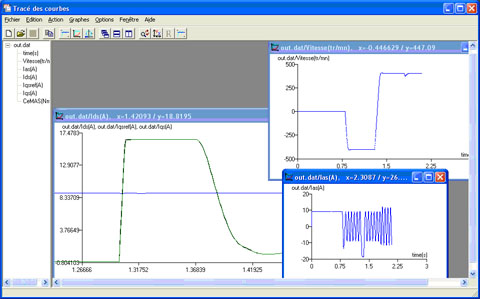
Capture écran de ControlDesk
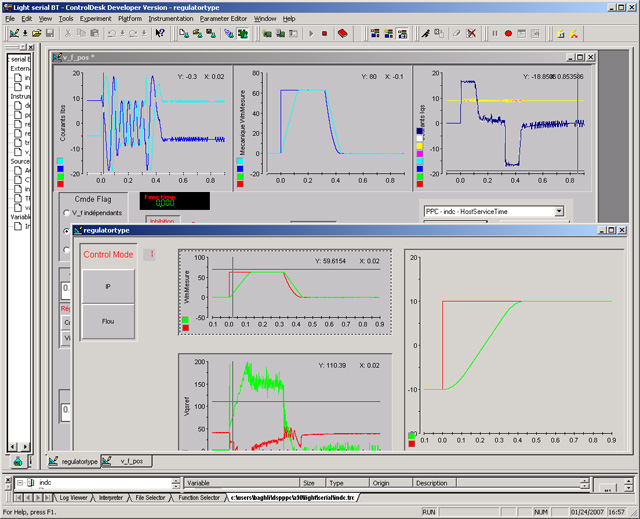
Acquisition de signaux suite à un échelon de position de référence en régulation de position.
On distingue en bas à droite (position de référence : échelon en rouge, position réelle : courbe en vert).
En haut au milieu (vitesse de référence : bleu foncé, vitesse réelle : cyan). En haut à droite (courant Iqs ref : cyan, Iqs réel : bleu foncé, Ids ref : rouge, Ids réel : jaune).
On voit bien la qualité de la réponse sur un système avec 4 boucles de régulation (position, vitesse, Ids, Iqs).
La position atteint la valeur de consigne sans dépassement et en douceur. Pour ce faire, le régulateur de position sort une consigne de vitesse qui atteint une valeur de palier de 600 tr/mn tant que le moteur se trouve loin de la position finale puis quand il s'en approche, le régulateur de position diminue progressivement la vitesse de référence.
Cette vitesse de référence change donc sans arrêt dans ce régime de poursuite et on voit bien que le régulateur de vitesse asservi la vitesse de la machine tout au long des changements de référence en imposant le couple maximal de la machine.
Le couple est représenté par le courant Iqs. Au début, la machine est en accélération maximale Iqs=16.5 A, puis quand elle atteint la vitesse de palier, le régulateur de vitesse diminue la consigne de courant. Ensuite, lorsque le régulateur veut freiner la machine, il passe le moteur en accélération négative à Iqs= 16.5 A, puis diminue afin que le positionnement se fasse sans dépassement.
Développement d'outils
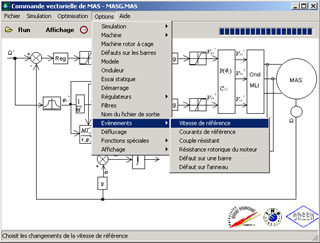
Logiciel MASVECT écrit en C++ / VCL. Il permet de simuler des modèles dq et à barres (défauts rotoriques) avec ou sans commande vectorielle.
Différents types de régulateurs (classiques, flou, neuronaux) y sont implantés ainsi que des méthodes d'identification (Génétiques, PSO).
Courbes résultats de simulation de commande vectorielle de machine asynchrone.
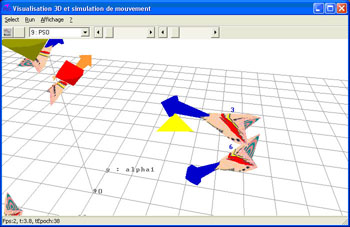
Visualisation 3D (à l'aide d'un programme écrit en C++ / openGL) de l'évolution de l'essaim de particule (PSO)
lors d'une optimisation des angles de commutation d'un onduleur à 2 niveaux.
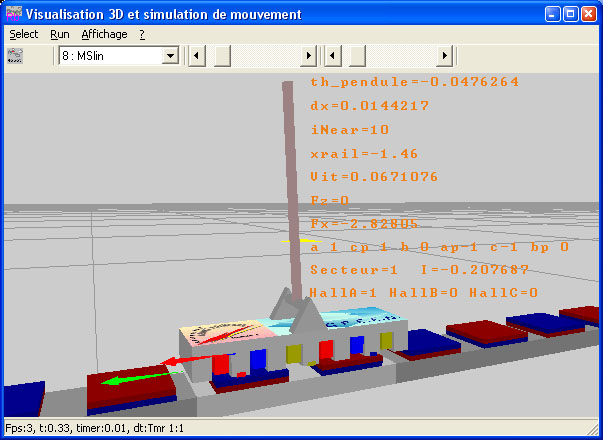
Logiciel Robots, il permet de simuler et visualiser le comportement de robots et de moteurs linaires dans un environnement 3D.
Ici est représenté une machine synchrone linaire. Le mobile comporte des enroulements, des sondes à effet Hall et un pendule inverse. Le rail comporte des aimants permanents.
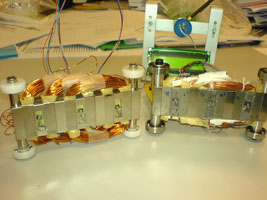
La maquette expérimentale permet de valider les essais de simulation :
Liste des publications
Revenir à la page d'accueil
Dernière mise à jour : 23 février 2007