L'objet de notre étude se compose d'une bobine à noyau de fer (un boulon ferromagnétique qui la maintient au support). Elle comporte N spires parcourues par une courant i. En dessous du noyau, à une distance de 1 mm, on place une sonde à effet Hall qui permet de mesurer la valeur de l'induction magnétique B de manière linéaire (Honeywell SS459). Cette bobine attire un aimant (NFeB) en dessous duquel on peut coller un objet léger (stylo par exemle).
La fonction de ce système est de réaliser la lévitation de l'objet. Le courant dans la bobine est régulé par un microcontrôleur et appliqué par un hacheur 4-quadrants de manière à ce que, si l'objet (et donc l'aimant) s'éloigne de la sonde à effet Hall, alors le courant i devient négatif et l'aimant est attiré. Au contraire si l'aimant s'approche trop, l'induction au niveau de la sonde magnétique s'inverse de sens et la régulation imposera un courant positif qui fera éloigner l'aimant.
Le processus de lévitation magnétique est naturellement instable et il convient d'apporter une régulation rapide pour maintenir en équilibre l'aimant et l'objet qui y est collé. On peut obtenir des distances de l'ordre du centimètre.
Nous utilisons un microcontrôleur
dsPIC 30F3010
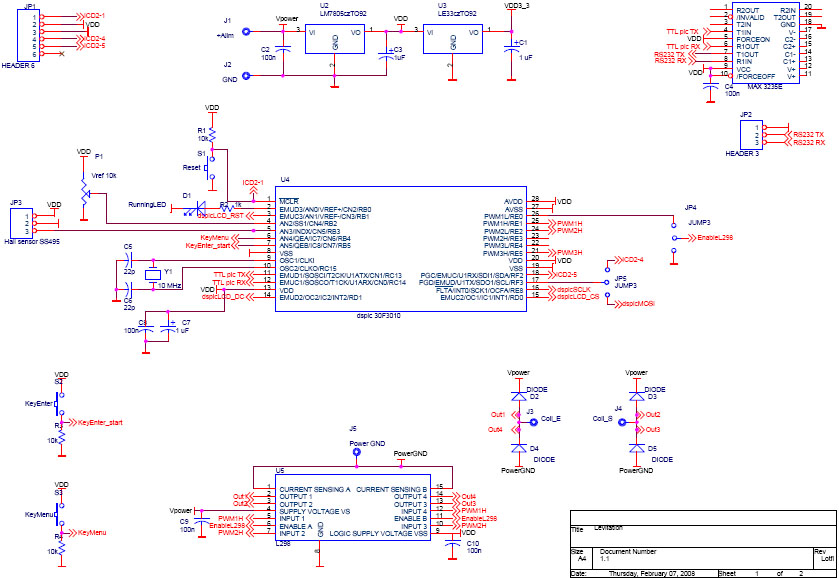
de chez Microchip comme système numérique. Pour le hacheur 4 quadrant, nous avons utilisé le L298 de ST microelectronics dans une version initiale mais nous nous sommes tournée vers un onduleur triphasé avec diodes de roue libre intégrés (que nous utilisons en hacheur 4 Q) le L6234 dans la version "light" que nous présentons ici .
mots clefs : microcontrôleur dspic 30F3010, hacheur 4 quadrant, Bluetooth (profil SPP).
On remarque le connecteur ICD2 propriétaire (notre convention) qui permet d'avoir une solution en debuggage.
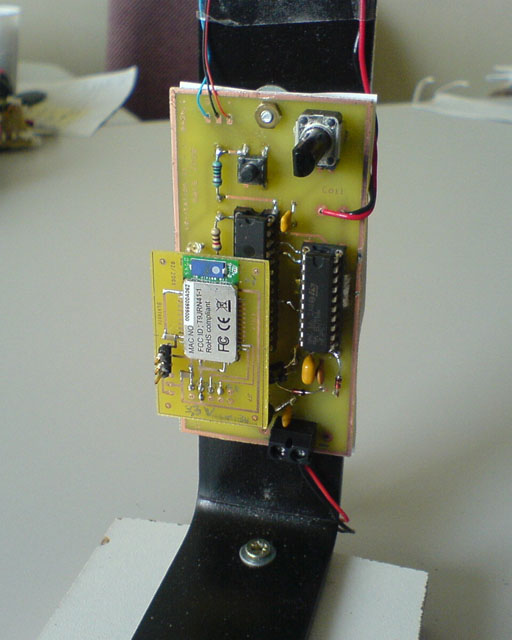
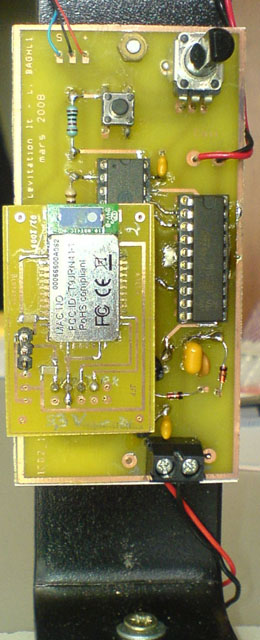
Maquette expérimentale :
Photos de la maquette expérimentale, cliquez pour zoomer :
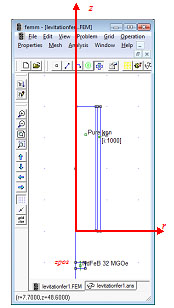
Etude électromagnétique :
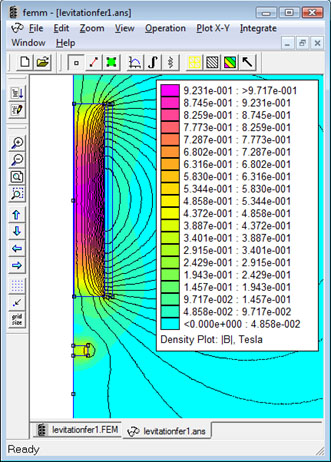
A l'aide du logiciel FEMM, nous cherchons à identifier l'induction B mesurée à 1 mm en dessous de la bobine (emplacement de la sonde Hall) et la force électromagnétique Fz qui s'exerce sur l'aimant.
Géométrie du système rentrée dans le logiciel de calcul de champ
Résultats d'un calcul de champ
Programmes accompagnateurs :
Nous proposons des programmes (livré en OpenSource)
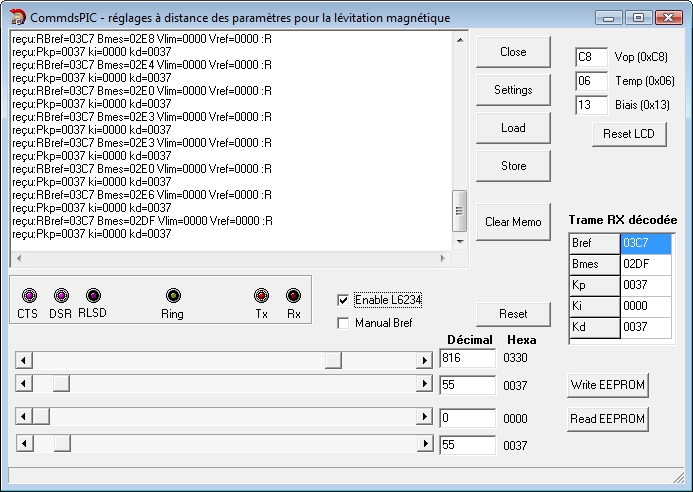
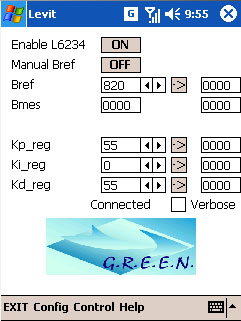
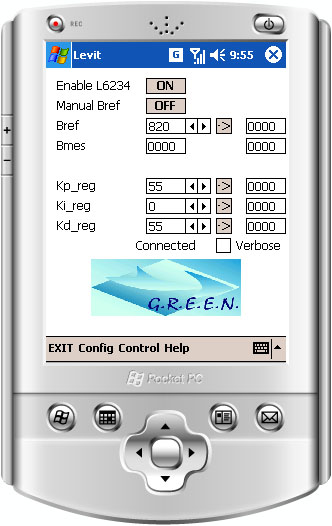
Ces programmes permettent de commander à distance le montage et changer les paramètres du régulateur PID.
Commandes :
Enable L6234
Manual Bref
Write EEPROM : demande au dspic de sauver les paramètres du régulateur. De cette façon, quand le dspic est réinitialisé (Reset), il recharge les paramètres sauvés.
Read EEPROM : demande au dspic de lire paramètres stockés du régulateur.
Version initiale (Hacheur L298 et écran LCD3310) : levitation.pdf Schéma du montage. levitation_orcad.zip Schéma et pcb. levitation.zip Programme source complet (nécessite MPLAB et le compilateur C30).
Programmes de commande à distance (pour version dspic light) : commdspic.zip Exécutable pour Windows. levitation_light_bds.arj Sources pour Windows. levit_ppc.arj Exécutable et sources pour PocketPC. levitation_jar.zip Exécutable et sources de la Midlet Java (téléphone portable compatible Java MIDP 2.0).