Documents de cours : Architecture matérielle de Commande de Machines
par Lotfi BAGHLI
Cette page présente le support en ligne de mon cours à la Faculté des Sciences de l'Ingénieur, Université Aboubakr Belkaeid, Tlemcen.
Schémas et ressources sont disponibles.
Documents architecture matériel de commande (DSC/DSP) :
Documents Commande de machines :
Datasheets :
Logiciels et programmes :
- MPLAB X IDE.
- Compilateur C X16
- cmde.c : fichier initial du TP2 (version MPLAB 8.x).
- cmde.mcp : fichier projet MPLAB du TP2.
- cmde.c : NEW : fichier initial du TP2 (version MPLABX).
- MASVECT : Simulation de la MAS (régime transitoire et commande vectorielle).
- FMM : Force magnétomotrice et champ tournant.
Courbes des variables internes d'une commande vectorielle de MAS :
Capture écran de Trace31 (carte dSPACE DS1102) :
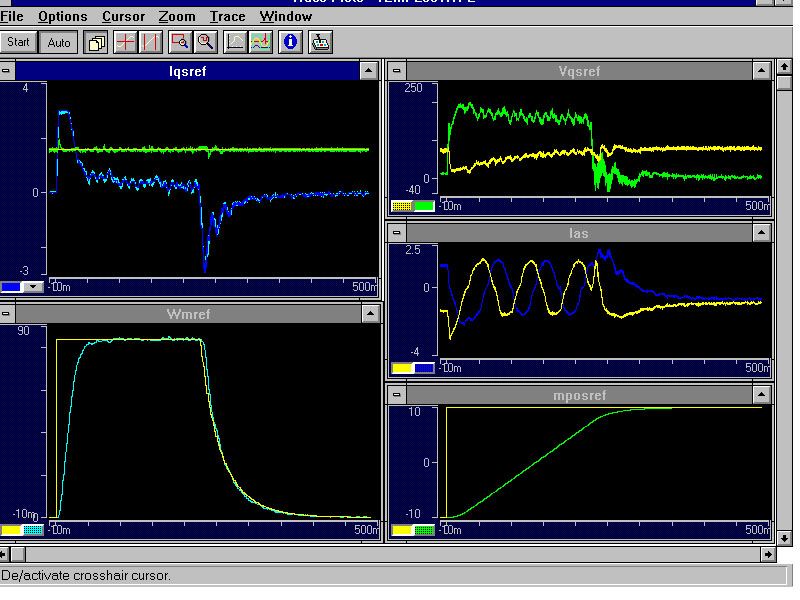
Machine Asynchrone de 1 kW.
Commande en position. Explications dans le paragraphe qui suit.
Capture écran de ControlDesk (carte dSPACE DS1104) :
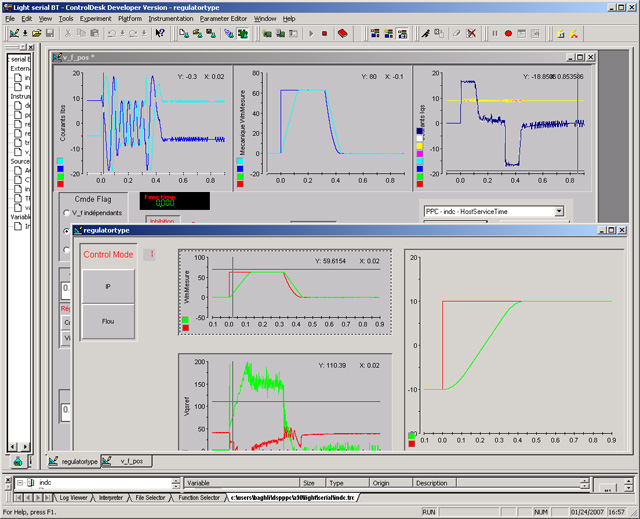
Machine Asynchrone de 5.5 kW.
Acquisition de signaux suite à un échelon de position de référence en régulation de position.
On distingue en bas à droite (position de référence : échelon en rouge, position réelle : courbe en vert).
En haut au milieu (vitesse de référence : bleu foncé, vitesse réelle : cyan). En haut à droite (courant Iqs ref : cyan, Iqs réel : bleu foncé, Ids ref : rouge, Ids réel : jaune).
On voit bien la qualité de la réponse sur un système avec 4 boucles de régulation (position, vitesse, Ids, Iqs).
La position atteint la valeur de consigne sans dépassement et en douceur. Pour ce faire, le régulateur de position sort une consigne de vitesse qui atteint une valeur de palier de 600 tr/mn tant que le moteur se trouve loin de la position finale puis quand il s'en approche, le régulateur de position diminue progressivement la vitesse de référence.
Cette vitesse de référence change donc sans arrêt dans ce régime de poursuite et on voit bien que le régulateur de vitesse asservi la vitesse de la machine tout au long des changements de référence en imposant le couple maximal de la machine.
Le couple est représenté par le courant Iqs. Au début, la machine est en accélération maximale Iqs=16.5 A, puis quand elle atteint la vitesse de palier, le régulateur de vitesse diminue la consigne de courant. Ensuite, lorsque le régulateur veut freiner la machine, il passe le moteur en accélération négative à Iqs= 16.5 A, puis diminue afin que le positionnement se fasse sans dépassement.
Présentation de la partie expérimentale :
Carte de commande : Carte pédagogique permettant de mettre en oeuvre la programmation du dspic et des systèmes d'informatique industrielles. Elle permet d'étudier :
- Système temps réel, timers, interruptions.
- Les entrées sorties logiques (I/O port).
- La conversion analogique numérique (ADC).
- La communication série (UART / RS232) avec un PC pour récupérer les grandeurs en temps réel, aficher les courbes mais également d'agir sur les variables du programme du dspic (changer les paramètres d'un régulateur PID en temps réel).
- Le pilotage d'un moteur triphasé via un onduleur en C.I. L6234 commandé en MLI (PWM, rapports cycliques).
Plus d'informations concernant ce dspic et sa mise en oeuvre sont disponible sur la page d'introduction au dspic.
Photos :
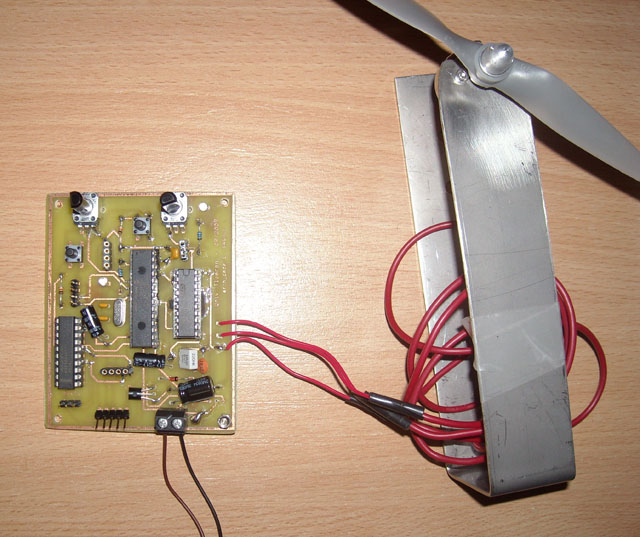
Carte de commande pilotant un petit moteur synchrone portant une hélice de modèle réduit.
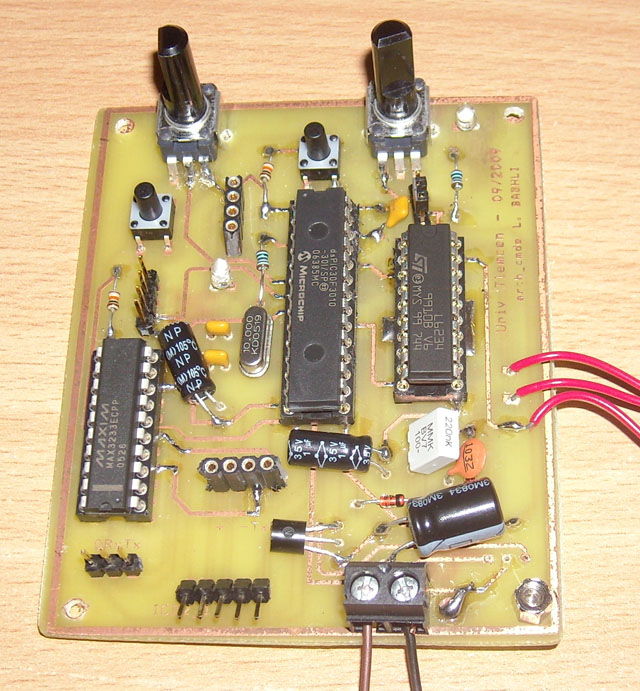
Détail de la carte
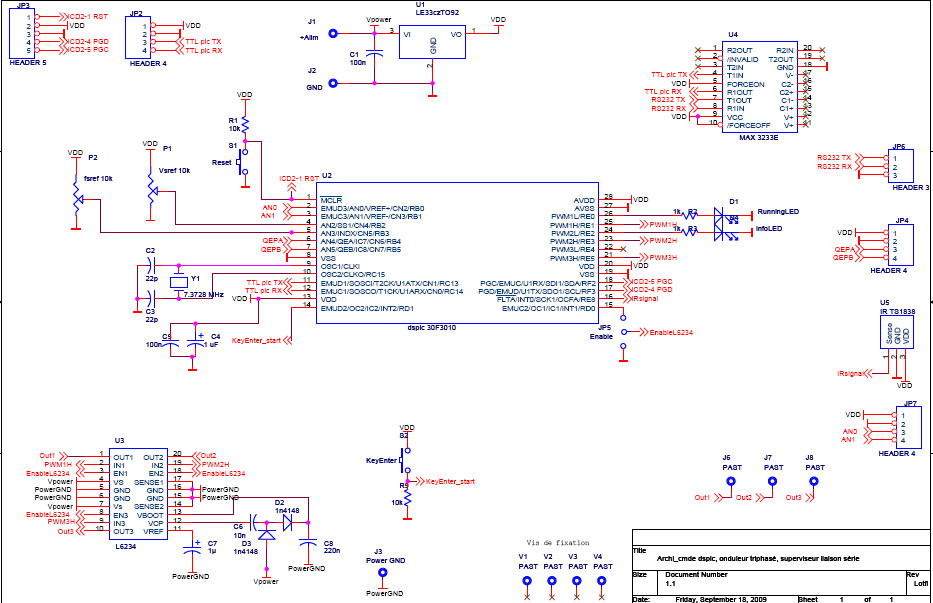
Schéma
Description :
La carte comporte un microcontrôleur dsPIC 30F3010, un onduleur triphasé L6234, un transducteur RS232 MAX3233 et les composants nécessaires au bon fonctionnement de la carte (boutons poussoirs, potentiomètres, LED, capacités, résistances...).
Ressources et schémas.
Download :
archi_cmde_dspic_L6234_sch.pdf Schéma électronique de la carte.
dsPIC 30F3010 Caractéristiques du dspic utilisé.
L6234.pdf Datasheet de l'onduleur triphasé L6234.
Back to homepage
Mise à jour : 10/11/2009